- 4.1 Permanent Magnet (PM) Steppers
- 4.2 Variable Reluctance (VR) Steppers
- 4.3 Hybrid (HY) Steppers
- 4.4 Stepper Control
- 4.5 Summary
This chapter is from the book
This chapter is from the book
This chapter is from the book
4.3 Hybrid (HY) Steppers
A hybrid (HY) stepper provides the best of both worlds. Like a PM stepper, its rotor has magnets that provide torque. Like a VR stepper, the rotor has teeth that improve the angular resolution. As an example, Figure 4.7 depicts the JK42HW34 hybrid stepper from RioRand.
)
Figure 4.7 A hybrid (HY) stepper
Hybrid motors have two disadvantages. First, HY steppers can be significantly more expensive than PM steppers. Second, HY steppers are larger and heavier than PM steppers. To see why this is the case, you need to understand their structure.
4.3.1 Structure
If you followed the discussions of PM and VR steppers, HY steppers won’t present any difficulty. Their rotors and stators are different from those of either stepper type, but the principle of their operation is similar.
Rotor
If you compare the HY stepper depicted in Figure 4.7 to the PM stepper in Figure 4.1, you’ll see that the HY stepper is longer. The reason for this is that the HY stepper rotor has (at least) two rotating mechanisms connected to one another. These are called rotor poles, and Figure 4.8 gives an idea of what they look like.
){kind=link}
)
Figure 4.8 Rotor poles of an HY stepper
The rotor poles are magnetized so that one behaves like a north pole and one behaves like a south pole. Each pole has its own teeth, and the teeth of one rotor pole are oriented between those of the other. The angular difference between the two sets of teeth determines the step angle of the motor. The more teeth the stepper has, the better the angular resolution.
The rotor in Figure 4.8 has one pair of rotor poles, but other HY steppers may have two, three, or more pairs. Adding rotor poles increases the stepper’s rotational torque and holding torque, but also increases its size and weight.
Stator
The stator windings of a PM stepper or VR stepper are too large to attract/repel the teeth of one rotor pole without repelling or attracting the teeth of the other rotor pole. For this reason, the stator of an HY stepper has teeth that are approximately the same size as the teeth on the rotor. This is shown in Figure 4.9.
){kind=link}
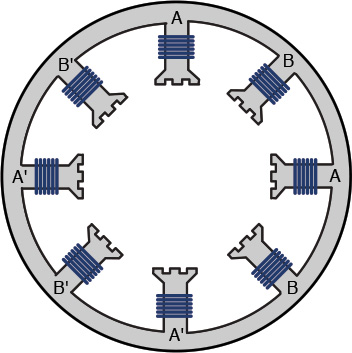
Figure 4.9 Toothed stator of an HY stepper
In this figure, each winding has three teeth. In a real stepper, the windings may have many more. If a winding is energized to produce a north pole, its teeth will attract the teeth of the rotor’s south pole. If a winding behaves as a south pole, its teeth will attract the teeth of the rotor’s north pole.
4.3.2 Operation
Like a VR stepper, an HY stepper can have multiple phases, one for each pair of windings. But the majority of the HY steppers I’ve encountered are like PM motors. That is, the windings are divided into two phases: A/A’ and B/B’. These are the phases labeled in Figure 4.9.
Each phase receives positive current, negative current, and zero current. When one phase is energized, its windings attract the teeth of one rotor pole. When the next phase is energized, its windings attract the teeth of the other rotor pole. Hybrid steppers commonly have 50–60 teeth on a rotor pole, which increases the angular resolution. It’s common to see hybrid steppers with step angles as low as 1.8° and 0.9°.