- 4.1 Permanent Magnet (PM) Steppers
- 4.2 Variable Reluctance (VR) Steppers
- 4.3 Hybrid (HY) Steppers
- 4.4 Stepper Control
- 4.5 Summary
This chapter is from the book
This chapter is from the book
This chapter is from the book
4.2 Variable Reluctance (VR) Steppers
Just as resistance determines the flow of electric current, reluctance determines the flow of magnetic flux. In a variable reluctance (VR) stepper, the rotor turns at a specific angle to minimize the reluctance between opposite windings in the stator.
The primary advantage of VR steppers is that they have excellent angular resolution. The primary disadvantage is low torque.
This section presents VR steppers in detail. I’ll explain their internal structure first and then show how they rotate as their windings are energized.
4.2.1 Structure
Structurally speaking, variable reluctance (VR) steppers have a lot in common with PM steppers. Both have windings on their stator and opposite windings are connected to the same current source.
However, there are two primary differences between VR steppers and PM steppers:
- Rotor—Unlike a PM stepper, the rotor in a VR stepper doesn’t have magnets. Instead, the rotor is an iron disk with small protrusions called teeth.
- Phases—In a PM stepper, the controller energizes windings in two phases. For a VR stepper, the controller energizes every pair of opposite windings independently. In other words, if the stator has N windings, it receives N/2 signals from the controller.
Figure 4.5 illustrates the rotor and stator of a VR stepper. In this motor, the stator has eight windings and the rotor has six teeth.
){kind=link}
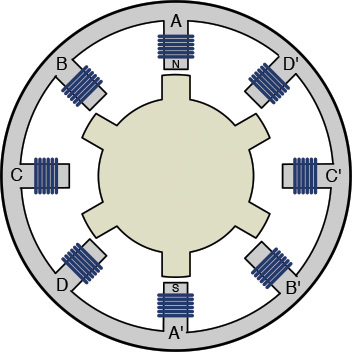
Figure 4.5 Structure of a variable reluctance (VR) stepper
The rotor doesn’t have magnets, but because it’s made of iron, its teeth are attracted to energized windings. In the figure, the A and A’ windings are labeled N and S, which shows how they’re energized by the controller. The teeth in the rotor align with these windings to provide a path for magnetic flux between A and A’.
4.2.2 Operation
As illustrated in Figure 4.5, only one pair of teeth is aligned with the windings at any time. When the controller energizes a second pair of windings, the rotor turns so that a different pair of teeth will be aligned. Because the teeth aren’t magnetized, it doesn’t matter whether a winding behaves as a north pole or as a south pole.
This can be confusing, so Figure 4.6 illustrates the rotation of a VR stepper. In this example, the stepper rotates 15° in a counterclockwise orientation.
)
Figure 4.6 15° rotation of a VR stepper
In Figure 4.6a, the controller has delivered current to the B and B’ windings, and the rotor has aligned itself accordingly. In Figure 4.6b, the C and C’ windings are energized. The C and C’ windings attract the nearest pair of teeth, which moves the rotor 15° in the clockwise direction.
If you know the number of windings in the stator (Nw) and the number of teeth on the rotor (Nt), the step angle of a VR stepper can be computed with the following equation:
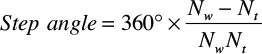
In Figure 4.6, Nw equals 8 and Nt equals 6. Therefore, the step angle can be computed as 360(2/48) = 15°. The angular resolution can be improved by increasing the number of windings and teeth. With the right structure, the step angle can be made much less than that of a PM stepper.
However, there’s a problem. The torque of a VR stepper is so low that it can’t turn a significant load. For this reason, VR steppers are not commonly found in practical systems. In fact, I’ve only ever seen a handful of VR motors for sale.
To make up for the shortcomings of VR steppers, engineers have designed a motor that combines the resolution of a VR motor and the torque of a PM motor. This is called a hybrid (HY) stepper.